Jerome Graves

Experience with mechanical and mechatronic design (robotics, industrial
machines).
Experience with MCAD software (fusion360), Different
fabrication techniques (3D printing, laser cutting, 3-axis milling
)
Experience with designing digital systems using microcontrollers, FPGAs, and SOCs. Experience with ECAD tools (Autodesk Eagle), soldering, testing and development boards.
Experience with developing real-time systems using C, C++ and VHDL. Experience with WinCE and Linux operating systems. Experience with wired and wireless communication protocols(UDP, HTTP/IP, I2C, SPI)
Experience with ROS (robotic operating system) using C++ and Python. Integrating sensors, robotic hardware and creating control systems. Experience with Path planning, vision systems, manipulators, Inverse kinematics, mobile robotics

A engineer from London, UK. Currently completing a PhD in electronic and electrical engineering studying 3D ultrasonic imaging of ice cores at London South Bank University .With experience with robotic systems, digital and analogue circuit design, mechatronics design , low-level and high-level programming languages. Well-versed in technology and writing code to create systems that are reliable and user-friendly. With the proven ability to develop hardware software systems and effectively track changes. A confident communicator, strategic thinker, and innovative creator ready to develop cutting edge systems. for more information see my linkedin
I graduated with a 1st class degree in electronic and electrical engineering from London South Bank University in 2020. As a member of the robotics society, I had the pleasure of representing the university in the Engineering for People (EfP) Design Challenge, Mayor's Entrepreneur Competition, Pi Wars and the ImechE design challenge. I have a passion for robotic control software and my final year project was titled Quadrupedal robotic Platform for research on legged motion. It was a mechatronic project that required me to design and build a 4 legged robot and control software that would traverse over uneven terrain, using ROS (Robotic Operating System).
I worked at London south Bank University (2021-2022) as an associate researcher, in the mechanical engineering department. My role required me to design a novel machine (thermal transfer printer) for the packaging industry with input from both academic and industrial partners.
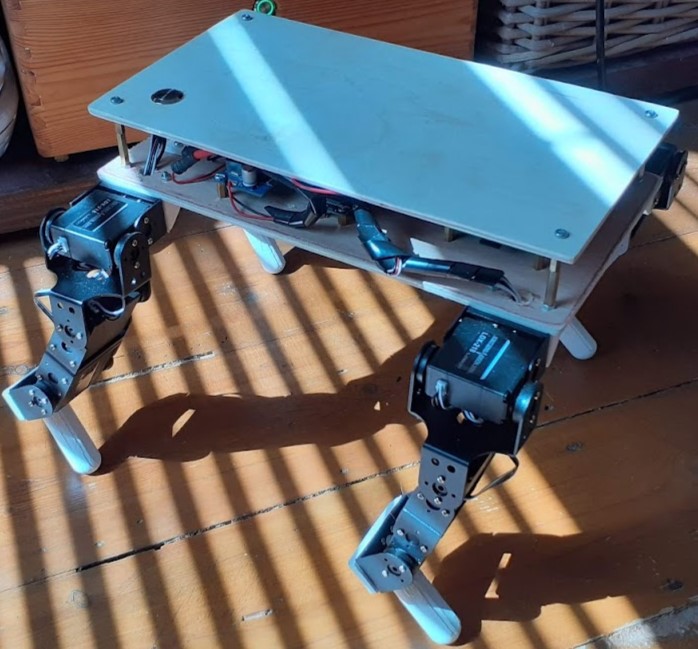
The design and creation of a quadrupedal robotic platform and implementation of robotic control algorithms for legged motion planning using ROS (robotic operations system).
View Paper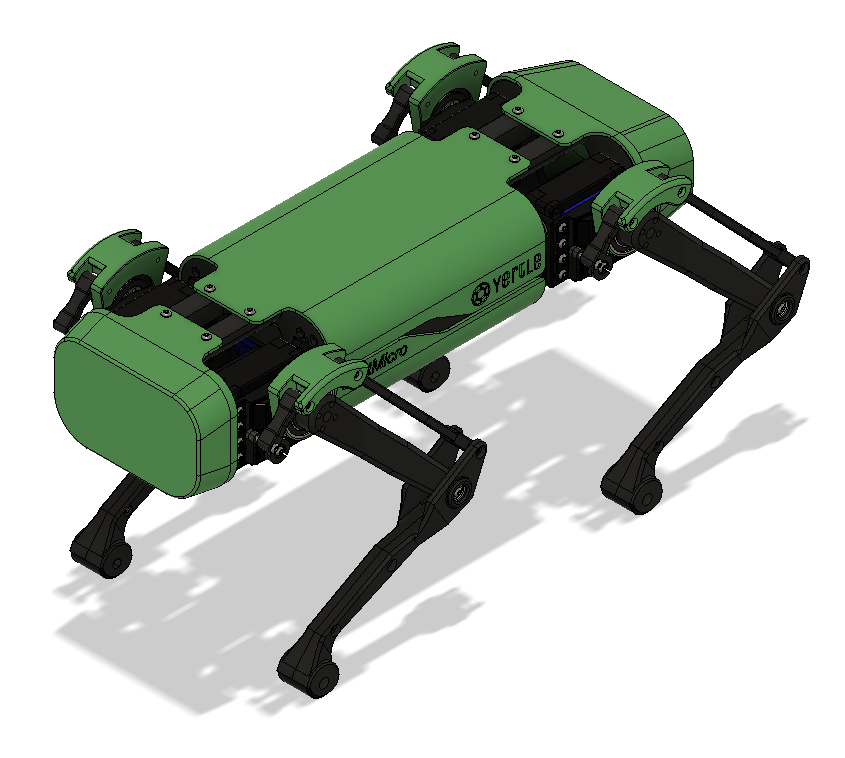
A continuation of my undergraduate project increasing its capability while reducing build cost.
View Project
This project is to design, build and test a new ultrasonic tool which allows us to view the internal crystal structure of ice cores.
View Project
This white paper is aimed at people who are interesting in coding, searching for information about the technology used today and the implications modern research might have on the industry. It presents the limitations and inefficiencies of the current coding technologies and gives use cases for more efficient and cost-effective technologies
View Paper